新闻动态





 浏览量:4930
分享到:
浏览量:4930
分享到:
刘先卫,浙江大学航空航天学院固体力学专业2018级硕士研究生,本科生阶段曾获学业二等奖学金,中国航天奖学金等;积极参与各种学科与课外竞赛,曾获得全国大学生航空航天模型锦标赛太阳能项目第六名,浙江大学中控杯机器人竞赛三等奖,大学生挑战杯竞赛省二等奖等荣誉。研究生期间,在浙江大学交叉力学中心王宏涛老师课题组机器人实验室负责项目“轮腿式跳跃机器人的研究与开发”,取得了卓越的成果。

兴趣使然的科研起点
出于从小对各种航空、电子和机械装置的兴趣,高考后填报志愿时他毫不犹豫地选择了浙江大学航空航天学院作为人生的新起点。尽管开始时学习和生活进行地并不特别顺利,在逐步的摸索中他也找到了正确的方向。幸运的是当初的热情并没有消退,尤其是加入浙江大学航模队后,每天沉浸于航模和机器人的世界中使他接触到了更多新鲜的东西,视野也更加宽阔了。经过四年的本科学习,他确定机器人方向就是他的下一个人生阶段的正确道路,因此他又毫不犹豫地选择了王宏涛老师课题组的机器人实验室。
上下而求索
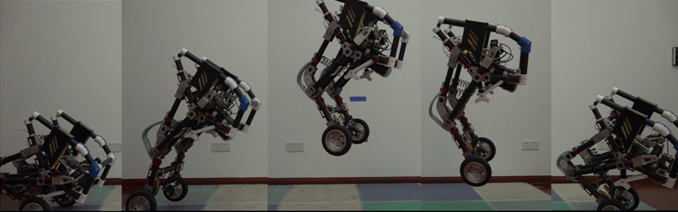
尽管目标是明确的,但初入实验室的一段时间他也不知道从何入手,只能苦读相关文献。这时学长和老师的建议让他豁然开朗,尤其是将绞合线驱动器与腿式机器人的构型结合的可能性,因此有了结合轮式机器人和腿式机器人两者优越性这样的想法。有了清晰的想法和设计思路后,他立刻投入相关的科研工作中。由于具有一定程度的相关基础,一个初步的轮腿式机器人原型很快成型。尽管由于设计时的考虑不周,第一代的轮腿式机器人结构强度过于低,不能实现预先设想的跳跃功能,但这并没有打消他对于机器人研究的积极性。通过汲取第一代设计的经验和教训,通过对结构强度上力学参数的考虑与设计,第二代轮腿式跳跃机器人也在几个月后被加工制造出来。通过不断地实验和调整相关参数,第二代轮腿式机器人最终能达到一个将近一米的跳跃高度,尽管跳跃后机器人的落地总是伴随着许多结构零件的损坏,但他认为离预期目标已经不远了。一鼓作气,第三代轮腿式跳跃机器人也在两个月后组装完成。令人欣喜的是,这一代的轮腿式机器人终于能实
现最初预期的效果了。