深度动力机器人研究
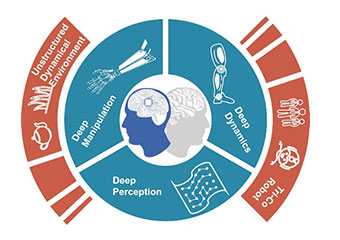
仿人机器人是连接力学与人工智能的纽带,具有灵巧操纵和灵活运动的双足机器人更为人工智能研究提供重要平台, 仿人机器人甚至将为人类自我认识提供新的窗口。目前这一领域从顶层设计理念到底层硬件驱动和控制方法均尚待探索。我们提出设计仿人、 硬件仿生以及深度神经网络控制(Deep Manipulation, Deep Dynamics, Deep Perception)的研究思路, 设计高效高功率密度的仿肌肉形电极驱动系统,发展基于人体姿态的灵巧操纵和灵活运动网络系统,结合柔性电子实现深度感知,引领未来机器人的发展。





 研究方向
研究方向