学术成果





 科研进展
科研进展
交叉力学中心机器人实验室以实现具有灵巧操纵能力、高机动性仿人机器人为目标,开展了灵巧机械手和高机动性能机械腿的研究。
机械手作为机器人的末端执行器,对于机器人执行任务,与环境进行交互起到了至关重要的作用。但是由于真实人手的高自由度、结构紧凑以及变模态输出特性,目前仍然属于机器人研究领域的重大挑战。自2017年3月份开始,金永斌开始对多指灵巧手进行研究。从人手的生理学结构出发,逐渐简化抽象,设计出自己的灵巧机械手。该机械手具有21个被动自由度,通过自由度兼并,由9个主动自由度控制。结合肌电传感技术与深度学习技术,对人体表面肌电信号进行采集与分析,从而对人的操作意图进行辨识,从而控制多指灵巧手进行运动。
目前,实验室成员提出了新的机械手设计思路,正在开展新一代多指灵巧手的组装与调试,争取实现高度集成、超长待机时间、轻巧的多指灵巧手。力争将多指灵巧手的应用领域从仿人机器人领域向残疾人义肢领域进行辐射。
向浙江大学前校长潘云鹤介绍与展示灵巧机械手
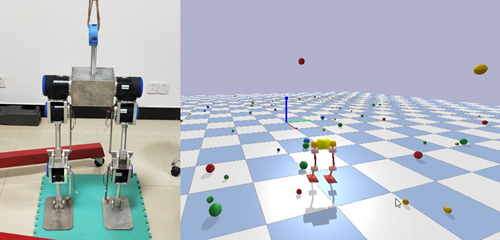
6自由度双足机器人样机与其仿真模型










